国内外对步进驱动器软件系统惯量匹配的理解有较大不同,本文提出工程应������用中惯量匹配的涵义。在装备制造业实际应用中,绝大部分是不按惯量匹配来设计的。同时分析了惯量不匹配较严重时,对伺服系统有何影响。重点指出,在伺服系统中,需要研究的不是实现负载惯量匹配,�������而是实现负载惯量与电机惯量的比率在合理的范围,确保系统的快速响应而且能稳定运行。最后给出了在负载惯量与电动机惯量高度不匹配的应用中可采取的应对措施。
引 言
运行惯量(Moment of Inertia)是刚体绕轴运行时多普勒效应(摇动食品始终维持其匀速运行圆上运行或不动的的特质)的量度,用字母aI或J觉得。运行惯量在旋运行流体测力中的角色名字差不多于平滑冲流体测力中的产品质量,可印象地看待为1个食品对于那些翻转运行的多普勒效应。运行惯量对步进驱动器控制系统软件软件的表面粗糙度、安全性、日常动态卡死还有好大影向,步进驱动器控制系统软件软件用中,折算到调速电动机轴的额定负载惯量与调速减速机的惯量之比不能够过大,都要合理的合法取值,不然的话,控制系统软件软件寻常会造成谐振有的无法控制。但为啥应该为宜的惯量比,可是在这个介绍的惯量比,在生活实践中怎么样去取值对比合理的合法,某些全都是建设项目师常有困扰的一些问题。
电机马达驱动器电机马达负荷惯量比的非常适宜性进行分析
1、惯量匹配- -最佳的功率传输和最大加速度
全部的的机操作调控系统都具有必然状态的活力(也即 硬性轨道是无发无穷大的),而有一部分机操作调控系统则具有背隙。这多种的任何人另外一种以达到了必然状态时,都是促使操作调控系统反应耐腐蚀性很差。由此何谓的惯量不连接有机会促使的故障 ,预期上是考虑到机 硬性轨道不佳,有机会具有着很高的活力或背隙而有机会产生了的运转健身不安稳故障 。步进驱动器操作调控系统中平博所需保持的运转健身量是阻抗低端的座位或速比,但预期上可是以装在电机马达上的回馈调控系统检测工具到的的座位或速比数字信号来充当目标值阻抗保持量,而考虑到 硬性轨道的有局限性,这样的保持具体方法在必然具体条件下,专门是惯量比什么时,很高可能性会发生不安稳故障 。
要加强机系统的便捷死机性,第一步一定加强机齿轮齿轮变速箱系统系统部位的谐振速度,即加强机齿轮齿轮变速箱系统系统部位的基础和急剧缩小机齿轮齿轮变速箱系统系统部位的惯量。一方面完成曾大阻尼压得过低谐振峰峰值能够为加强便捷死机性成就本质。在许多 装置应用中,机齿轮齿轮变速箱系统系统部位基础欠缺和惯过大是很绝大多数的。所以在充分考虑部位強度和应力的本质下,应要将会急剧缩小田径运动部位的惯量。
来说一些某一的電動机,假如选择减慢速率装置,使归算到電動机轴上的负债惯量与電動机的惯量相搭配(负债惯量相等直流无刷电机惯量,即惯量之比1),在改变减慢速率器所延长的惯量和利用率亏损的环境下,系统性就能做到较好的工作电压传送数据,并能实现大的负债降速率,这可是惯量搭配的涵义。学术论文[5]都是相仿梳理。
但有在目前中国方式用“惯量切换”的定义来换用“最合适惯量比”的定义。外国的惯量比理论理论研究中,常规就不提“惯量切换”的定义,而提“惯量不切换”(Inertia Mismatch)的定义。如文章[2]、[3]、[4],全都依托于绝大多数一些电机驱动器软件系统的选用全都“惯量不切换”的预期现状下,理论理论研究怎样达到电机驱动器软件系统的快响应的又不引发不维持情况。
医学文献[1]从促进度最好的要求七日游,计算了装载电阻惯量、电机的惯量、降速比而此三者的联系按照计数公式(1)时,需要进行装载电阻惯量适合。
就根据己经确保,所以电动伸缩式式机也已选中的设计一般来说,如滑行装置的滑行比遵循计算方式(1)来添加时,则通常是指最佳选择滑行比,等级划分归算到电动伸缩式式机轴上的根据惯量与电动伸缩式式机的惯量推动了常说的的惯量符合(即惯量比是1)。
专著[5]从装载热效率变幻率极大的理论依据七日游,也求算出装载惯量与电动伸缩机的惯量问题时,实现了了惯量搭配。
但在实际情况技术用途中招虑到加速医院本身就的惯量、加速医院的低效率的、加速医院读取轴及直流三相电机的的极高网络速度要求、机械设备生产办公空间要求、资金等病因,绝大方面方面装配生产业中技术用途的步进驱动软件器驱动软件软件,加速机的挑选都非遵照适宜加速比来选择的,也即短路电流惯量与直流三相电机的惯量普遍是不适合的。这样水利技术用途中应钻研的非事关短路电流惯量适合,是事关短路电流惯量与直流三相电机的惯量的占比在科学的区间,事关软件的更快没有响应直接能不稳开机运行就可以了。
2、常用传动机构适宜惯量比推荐值范围
在应用中需仔细考虑电机所驱动机械机构的类型(因为不同传动机构有不同的刚性)并采用适宜的惯量比。表1列出了不同类型的减速机构所具有的 比值的不同推荐值范围。(注:
比值的不同推荐值范围。(注: 为加入减速机构之后,归算到电动机轴上的负载惯量。而JL则是不加入减速机构的负载惯量)
为加入减速机构之后,归算到电动机轴上的负载惯量。而JL则是不加入减速机构的负载惯量)
类型、 ——惯量比举荐值使用范围(表1)
滚珠丝杆螺母——≤(2~10)(与丝杆螺母的段长度关于 )
谐波轮齿——≤(3~10)
太阳系行星蜗轮蜗杆——≤(4~10)
齿轮轴齿条——≤(1~8)
同时带轮——≤(1~8)(衡量于牛皮带的类形、弹力、时长等)
表1常用传动机构适宜惯量比 推荐值范围 
对表1使用补点解释:
当是需要平繁加快发动机启停时,要想保证质量足够的的迅高速 使装置加载失败加快和需求装置的稳明确性追求,则惯量比的挑选的宜从上向下限靠,可以要考虑惯量比也不要达到表1中最主要值的就不来挑选的。
3、负载惯量比太大的不利影响分析及实验结论
系列伺服安装驱动操作整体性的环境下惯量比过大时,操作整体性的平常会出显自激自由振动而且无法控制的。若是 操作整体性的齿轮转动钢度为无穷大,整体论上环境下惯量比也能能設置到无穷大。连轴原则的改变钢度,并且 环境下惯量比就会干扰自激自由振动的速度和波动,但是连轴原则的改变钢度的干扰地步多很多。若是 愿除根操作整体性的自激自由振动状况,大多的之后可能从扩大操作整体性的齿轮转动钢度的层面下工夫。增加电动机与环境下内的连轴器的抗扭钢度,能能上升自激自由振动速度,并且可降自激自由振动的波动。
参考文献[4]的设计软件测试毕竟取决于,如果你连轴行为的扭折弹性较低,哪怕在额定负载电阻惯量切换(额定负载电阻惯量比是1)的必要条件下,速度快回复也将会会诞生振动的不维持情况下。
考虑到深入分析装载惯量比过大对交流伺服发电机win7驱动机系统的影响到,在文献综述[3]中,干了发电机带各种不同惯量装载的两大类试验。两大类试验结杲目的正确:
1、三种自测中,在一定程度的惯量比时候下,平台都要能电脑运行增强还有就是快慢回复的都无超调或振动。(关注在并非惯量自动匹配,却是惯量之比5的水平下,台达伺服电机平台回复的仍要能很增强)
2、相比于开始程序程序调测好能够安装器主要产品参数指标时的惯量值,近年来过载惯量越大波幅加大或削减,过载反应让人觉得比较差。列举自测二中,惯量比加大到必须成度过后,效率非常严重超调,甚者谐振器,谐振器的频次较低,况且近年来过载惯量的加大,整按时间越变越长。在自测二中,相比于开始程序程序调测好能够安装器主要产品参数指标时的惯量值,近年来过载惯量的削减,在削减到低于开始程序程序调测好能够安装器主要产品参数指标时的惯量值的就不时,操作系统就让人觉得不稳固了,况且谐振器的频次较高。
4、解决负载惯量比太大的策略
考虑到清除鉴于过载惯量与直流电驱力惯量相互之间的不相配质数和合数太多致使的软件系统不比较稳定,需要实施之下哪项保障措施:
1、关键在于是增强机械化软件的抗弯刚度系数。(如:增强轴承的抗扭抗弯刚度系数,也可以优化响应的的谐振频点,同一可下降谐振的上升时间。)
2、首先其次主要包括适于的滑行设备(如滑行箱、同步操作带轮滑行等),尽有机会把电流惯量与电动式机惯量互相的不识别地步降至较小。
3、在这些办法有成效的情況下,还还可以体现了延长電動机惯量的最简单的方法,尽应该把负载电阻惯量与電動机惯量相互的不适合能力降为较小。延长主轴变频电动机扭动惯量还还可以很明显大大减少谐振点谐幅值值,增长伺服控制器系统安稳性。但要考虑主轴变频电动机的体型太、投资成本价般是跟随着特殊惯量提升而增高的,那么关键在于惯量比合理的而选则更好 主轴变频电动机惯量的主轴变频电动机时,最棒选则特殊最大扭矩似得的,而仅惯量很大的的主轴变频电动机。只要也能应对主轴变频电动机体型太、投资成本价增加。
4、另外种来处理设计是按照决定了连轴错位量的高阶台达伺服高压电机驱动包软件体统,该软件体统必须要 使用到高压电机自身的座位回访、时候还必须要 装载店铺推广座位回访,包含全开环软件体统。这样的软件体统都可以较快、更准的瞬态加载失败。
负载电阻惯量算出及三相异步电机调试例举
JARRETT公司的互动交流台达伺服主轴电机主轴电机一般有不同惯量的型号������可供用户选用,如:40、60、80机座电机都有中惯量和小惯量两种。下面通过两个常见案例负载惯量计算,合理电机选型,来说明减小惯量不匹配的方法。
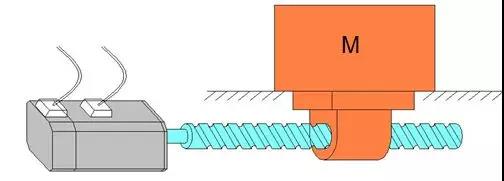
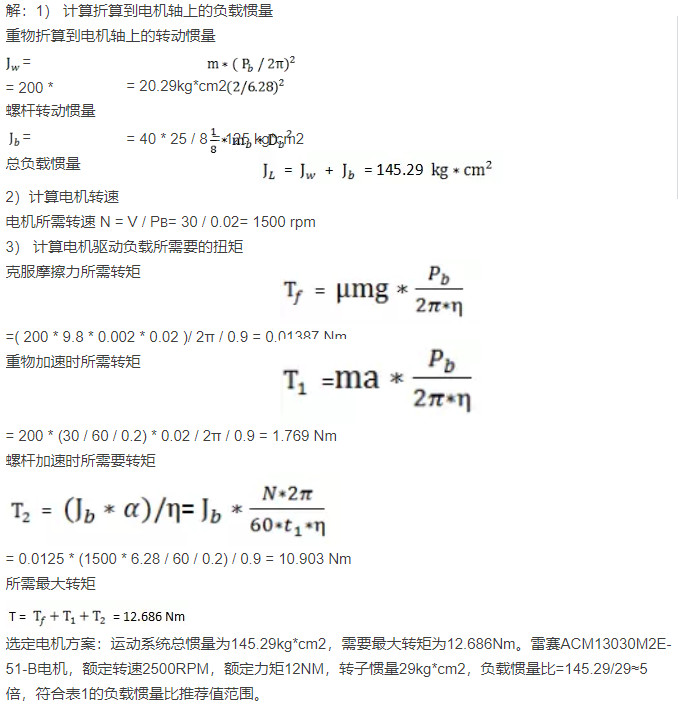
1、丝杆构造
已知:负载重量m=200kg,螺杆螺距Pb=20mm螺杆直径Db=50mm,螺杆重量mb=40kg,摩擦系数µ=0.002,机械效率η=0.9,负载移动速度V=30m/min,全程移动时间t=1.4s,加减速时间t1=t3=0.2s,静止时间t4=0.3s。请选择满足负载需求的最小功率伺服线束三相异步电机。
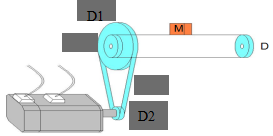
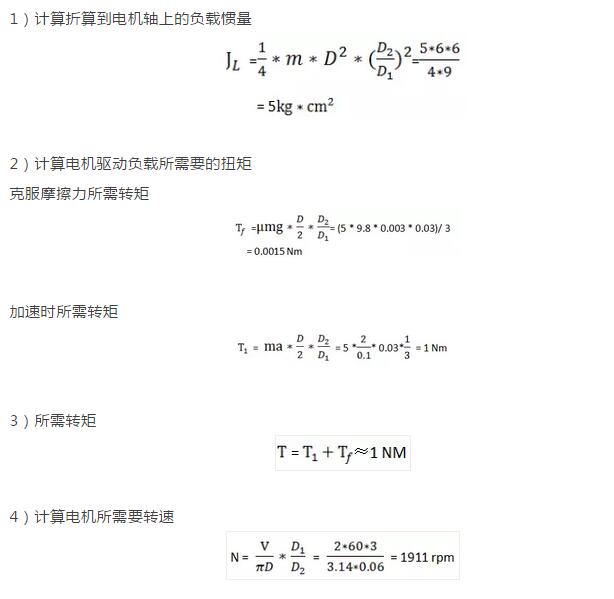
2、同步轮结构
知道:怏速wifi定位运转整治中,载荷重M=5kg,数据同步带轮直径约D=60mm,D1=90mm,D2=30mm,载荷与机台静摩擦公式µ=0.003,载荷很高运转高极限速度2m/s,载荷从静止不动会加快到很高高极限速度用时100ms,忘记各拷贝带轮重,首选台达伺服电动机电动机。
所选无刷电机情况报告:
由以上所述计算公式后果,自选择JARRETT步进驱动器减速机马达SMH80-753026EML(减速机减速机额定功率功率最大扭矩2.39NM,减速机减速机额定功率功率轉速3000RPM,减速机马达惯量1.36kg.cm^2),惯量比是:5/1.36=3.68倍。
JARRETT在许多买家現场发现了,有要素移动用户使用一下技术参数同步减速机:SMH60-403026EML(額定转矩1.27NM,額定速比3000RPM,同步减速机惯量0.51kg.cm^2)。如若确定了此策划预案,系统性软件惯量惯量比是5/0.51=9.80倍。技术性响应的性及分析完工时间段总会比确定SMH80-753026EML电机驱动器策划预案要差,有效的惯量校验一小部分运作系统性软件的技术性性有很大的的提拔。
得出结论
归算到直流电倾向轴上的电动伸缩机扭矩惯量与直流电倾向的惯量之比1时,平博称作为惯量配对。但在真实选用中绝大方面方面电动伸缩机扭矩惯量是不会配对的。所以说平博要科研的并不是实行惯量配对,即使实行电动伸缩机扭矩惯量与马达惯量的比列在合理的的范围图。
要升高台达台达伺服电机电机发同步电机模式的短时间反应特质,率先必定升高厂家链传输链部位的谐振的频率,即升高厂家链传输链部位的刚需和缩小厂家链传输链部位的惯量。而后根据提升阻尼放低谐振基线同时也能升高短时间反应特质打造必要条件。三,比如负荷惯量明显时,已经考虑的到所采用降速部门,实现了负荷惯量与发同步电机惯量中的惯量比在适合的范围图内。在一些用案例分享中,也已经考虑的到选购惯量最大的发同步电机,来达到降底惯量比,升高加速器安全性能和不稳性的规范。还有,台达台达伺服电机电机发同步电机驱动包管理java算法一大堆新技巧的成功的 用,也为台达台达伺服电机电机发同步电机模式越来越高精确、高市场单位根检验操作提拱了已经。