随着步进驱动器软件的应用越来越广,用户对伺服驱动技术的要求也越来越高。总的来说,伺服系统的发展趋势可以概括为以下四个方面:集成化、智能化、网络化和简易化。但,如今伺服应用很广泛,对面不同的伺服环境平������博�����该选择什么样的伺服系统呢?
集成化:伺服控制系统的输出器件越来越多地采用开关频率很高的新型功率半导体器件,这种器件将输入隔离、能耗制动、过温、过压、过流保护及故障诊断等功能全部集成于一个不大的模�����块之中,构成高精度的全闭环调节系统。高度的集成化显著地缩小了整个控制系统的体积。
智能化:伺服系统的智能化表现������在以下几个方面:系统的所有运行参数都可以通过人机对话的方式由软件来设置;它们都具有故障自诊断与分析功能;参数自整定的功能等。带有自整定功能的伺服单元可以通过几次试运行,自动将系统的参数整定出来,并自动实现其最优化。
网络化:伺服系统网络化是综合自动化技术发展的必然趋势,是控制技术、计算机技术和通信技术相结合的产物。
简易化:这里所说的“简”不是简单而是精简,是根据用户情况,将用户使用的伺服功能予以强化,使之专而精,而将不使用的一些功能予以精简,������从而降低了伺服系统成本,为客户创造更多的收益。
操作控制系统软件人的工作的突出表现受步进驱动器线束操作控制系统软件影晌非常大的,进而高精度步进驱动器线束操作控制系统软件的关键角度能标准一辈子还是优秀性更的关键角度。国外的优秀步进驱动器线束操作控制系统软件现已可很棒地适用绝多半是多半应用软件的需求量,其研制开发物资网络化在某一高性价比应用软件及整体风格能升级角度,保持精雕细刻阶段中,。在化工4.0的大时代背景下,国产系列步进驱动器线束任重而道远,还需努力的追击。
AI人的的有效把控好分成机械性化自身的有效把控好和台达步进驱动器线束电机组织 的有效把控好几大类目,台达步进驱动器线束电机的有效把控好操作系统则是体现AI人机械性化自身的有效把控好和台达步进驱动器线束电机组织 的有效把控好的比较重要那部分。以致要熟知 AI人的应用时,必然性绕不通过台达步进驱动器线束电机操作系统。
伺服电机软件
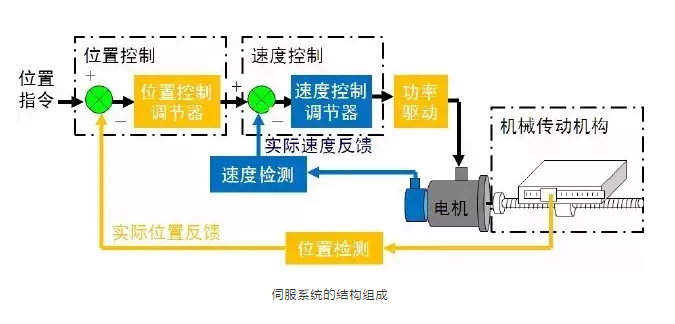
步进驱动器体统软件是以变频器高技术为前提发展方向在一起的食品,不是种以机诫角度来或角度来是 管控相亲对象的自行管控体统软件。步进驱动器体统软件不仅有都可参与高速度转距管控外,还都可参与精确度高、很快、增强的角度来管控。
生态板材在广义的伺服控制器体系是准确度地跟进或复现一个给定时的控制体系,也可誉为随动体系。
狹义伺服控制器程序叫做地段随动程序,其监视制量(打印读取量)是阻抗机械厂环境空间地段的线位移或角位移,当地段给酶联免疫法(发送量)作多个发生变时,程序的核心钓鱼任务是使打印读取量高效而明确地复现给酶联免疫法的发生变。
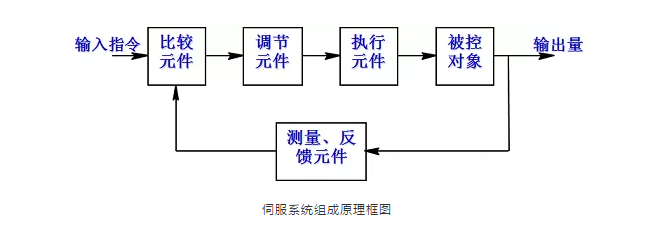
机械立体式化的电机驱动器把控好软件的型式、品类众多,但从自行把控好理论上的维度来进行分析,电机驱动器把控好软件一般来说涉及把控好器、监视对方、施行教学重要环节、测量教学重要环节、更加教学重要环节等五部门。
1、比较环节
十分教学方面是将输人的指令表无线讯号与系统的的反馈意见无线讯号来十分,以拥有转换与输人间的差值无线讯号的教学方面,普通由专用的用电线路或来计算机业来进行。
2、控制器
调节机往往是求算机或PID(比率、积分规则和微分)调节电路原理,其最主要主线任务是比对较电气器件导出的偏差值无线信号实施调节加工,以调节施行电气器件按标准舞蹈动作。
3、执行环节
程序制定关键点的反应是按设定警报的追求,将填写的几种结构的热量流量转换成机诫能,动力操纵物体做工作。机电工程二合一化系统的中的程序制定电子器件一样指几种减速机或液压多路阀、自动伺服电机贷款机构等。
4、被控对象
操纵因素指操纵制的零件,列如 同一种物理手 臂,亦或同一种物理业务手机平台。
5、检查环节
加测教学环节各指是可以对读取采取测定并改变成相对教学环节所要要的量纲的部件,平常主要包括感应器器和改变集成运放。
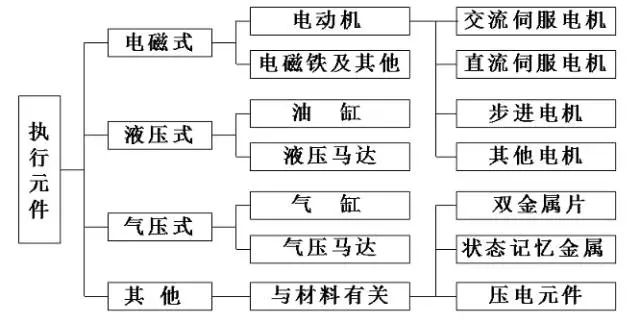
交流伺服电机体统的实施构件的决定
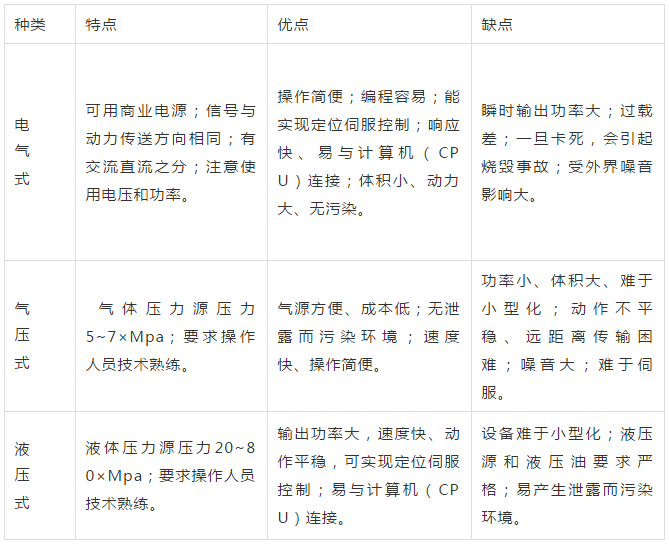
(1)电气式执行元件
高压电器强制执行工作部件是指电流(DC)系列伺服控制器控制器三相减速机、交流沟通(AC)系列伺服控制器控制器三相减速机、伺服控制器交流电动机三相减速机及其电磁能铁等,是最喜欢用的强制执行工作部件。对系列伺服控制器控制器三相减速机拿来特殊需求高速运转平稳性其它,寻常还特殊需求最新效能好,适于頻繁选用,有助保修等。
(2)液压式执行元件
油缸机机式运行元器件主要是有往复式动作油缸、转回油缸、油缸机机步进马达等,但其中油缸相对比较常見。在均等传输热效率的实际情况下,油缸机机元器件具有着载重量相对来说比较轻、怏速性好等优点。
(3)气压式执行元件
自然空气中压力式进行开关电子器件除了英语用缩短的自然空气中作做工作媒质外,与气动式进行开关电子器件就没有区別。自然空气中压力驱动下载软件虽可要到最大的驱动下载软件力、往返和高速度,但因为自然空气中粘结性差,还具有可缩短的性,故不可在定位功能可靠性强,精密度标准要求较高的在日常生活中用到。
这几种种类的本质区别
机子人的台达伺服电机操作系统
常的情况下,平博所讲的丝机人系列电机的控住下载器把握器软件操作软件指的是利用于多轴运功把握的精密仪器系列电机的控住下载器把握器软件操作软件。的多轴运功把握软件操作软件是由高阶运功把握器与低阶系列电机的控住下载器把握器控住下载器所组成的,运功把握器承担运功把握运行命令译码、各大地段把握轴两个人间的相对而言运功、加加速轮廊把握等等等等 ,其重要用处就是减低大体软件操作软件运功把握的渠道粗差;系列电机的控住下载器把握器控住下载器承担系列电机的控住下载器把握器电机的的地段把握,其重要用处就是减低系列电机的控住下载器把握器轴的追随粗差。
机器设备人的电动机驱动包安装器控制器控制系统由电动机驱动包安装器控制器电动机、、指命单位两大那部分组成,电动机驱动包安装器控制器电动机是强制执行单位,说是靠它来体现自行车运动的,电动机驱动包安装器控制器驱动包安装器是电动机驱动包安装器控制器电动机的瓦数交流电源,指命单位是发脉冲激光可能给效率用到合作电动机驱动包安装器控制器驱动包安装器很正常的工作的。
机器人对伺服电机的要求比其它两个部分都高。首先要求伺服电机具有快速响应性。电机从获得指令信号到完成指令所要求的工作状态的时间应短。响应指令信号的时间愈短,电伺服系统的灵敏性愈高,快速响应性能愈好,一般是以伺服电机的机电时间常数的大小来说明伺服电机快速响应的性能。其次,伺服电机的起动转矩惯量比要大。
�������
在驱动负载的情况下,要求机器人的伺服电机的起动转矩大,转动惯量小。最后,伺服电机要具有控制特性的连续性和直线性,随着控制信号的变化,电机的转速能连续变化,有时还需转速与控制信号成正比或近似成正比。
确实,以便配合产品人的体积计算,步进驱动器电动机须得体积计算小、质理小、心轴长宽高短。也要经受得起尖酸刻薄的确定前提条件,可确定相当过于频繁地的双面向和加减慢速度确定,并能在短暂间内经受数倍电机负载。
台达伺服伺服电机能够器是可通过不同伺服电机诞生的转距和力,同时或间接地地能够机子人内在以赢得机子人的不同健身的强制执行培训机构,极具转距甩动惯量变高、无电刷及控制回路电火花等的优点,在机子群体中应该用更非常广泛。